


合作客户/
拜耳公司 |
同济大学 |
联合大学 |
美国保洁 |
美国强生 |
瑞士罗氏 |






相关新闻Info
-
> 不同质量浓度、pH、盐度对三七根提取物水溶液表面张力的影响(一)
> 可逆pH调控的纳米复合稠油降黏剂:从高效乳化到快速油水分离(三)
> 液膜断裂点与电压最大值在表面张力测量中的对比研究(二)
> 酯官能化酰胺型双子表面活性剂的制备与性能研究
> 墙体基面界面剂粘结强度影响因素有哪些
> 烷基糖苷表面活性剂界面张力与润湿性相关性研究(二)
> 超微量天平应用实例:氧化焙烧除硒火试金重量法测定粗硒中金、银含量
> 基于脉冲焊接研究表面张力活性元素对Marangoni力的影响
> 温度、截断半径、模拟分子数对水汽液界面特性的影响规律(二)
> 拉筒法测定LiF-CaF2-Yb2O3体系的表面张力及变化规律
推荐新闻Info
-
> 超低界面张力下重油-水两相垂直流动型态实验研究与图版预测(四)
> 超低界面张力下重油-水两相垂直流动型态实验研究与图版预测(三)
> 超低界面张力下重油-水两相垂直流动型态实验研究与图版预测(二)
> 超低界面张力下重油-水两相垂直流动型态实验研究与图版预测(一)
> 表面张力对机械结合面接触载荷、真实接触面积以及接触刚度的影响规律(四)
> 表面张力对机械结合面接触载荷、真实接触面积以及接触刚度的影响规律(三)
> 表面张力对机械结合面接触载荷、真实接触面积以及接触刚度的影响规律(二)
> 表面张力对机械结合面接触载荷、真实接触面积以及接触刚度的影响规律(一)
> 一种改进的CSF模型:用于SPH流体仿真的光滑表面张力模拟(二)
> 一种改进的CSF模型:用于SPH流体仿真的光滑表面张力模拟(一)
来自于液滴的表面张力的灵感,开发一种在可变的地形上移动的轮子
来源:中国人工智能学会 浏览 1124 次 发布时间:2024-09-06
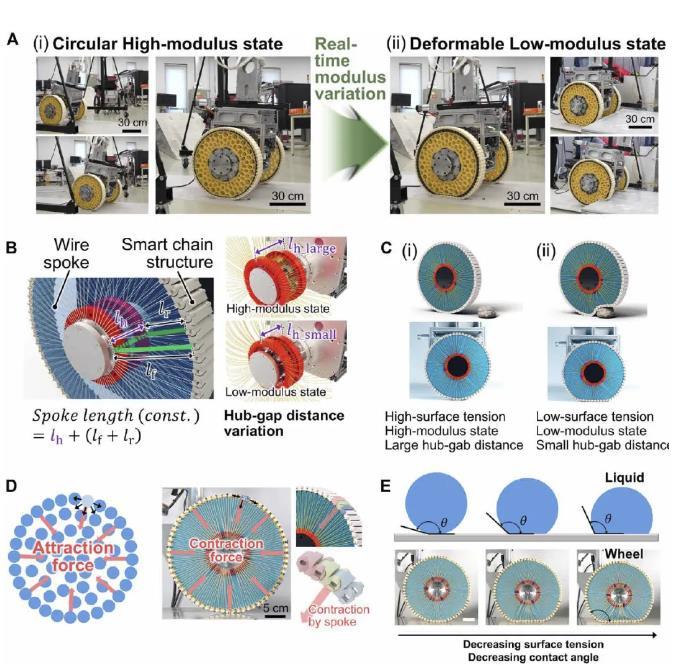
凭借其速度和低运输成本,车轮是机器人运动的有利选择。然而,车轮不能轻易地越过大障碍物,从而限制了它们在某些环境中的使用。近期Science Robotics发表的封面论文,Lee等人开发了一种刚度可调的轮子,可以实时改变,在平坦的地面上呈现出坚硬的圆形,在大障碍物上呈现出柔软的、可变形的形状。车轮外侧的智能链条结构通过辐条结构连接到中心轮毂。辐条中的张力可以调整以适应车轮的刚度,从而允许车轮在可变的地形上移动。车轮功能在四轮车辆和两轮轮椅系统中得到了展示。

这是一个受液滴表面张力启发的可变刚度轮。在液滴中,随着最外层液体分子的内聚力的增加,将液体分子向内拉的净力也增加。这导致高表面张力,导致液滴从引力引起的扭曲形状恢复为圆形。同样,车轮的形状和刚度是通过改变最外层智能链块的牵引力来控制的。随着连接到每个链块的钢丝辐条张力的增加,车轮特性反映了一般圆刚轮的特性,这在正常平坦地面上的高速运动中具有优势。相反,随着线辐条张力的减小,车轮的模量减小,并且根据障碍物的形状,车轮容易变形。这使得轮子适合克服障碍物,而不需要复杂的控制或传感系统。在此机理的基础上,将轮子应用于重达120 kg的两轮轮椅系统,实时实现了轮椅在室外环境中驾驶时,圆形高模量状态和可变形低模量状态的状态转换。
主要技术方法1.灵感来源:设计灵感来自于液滴的表面张力,液滴在外界作用力下能够通过表面张力恢复其形状,类似地,轮子通过改变其刚度来适应不同的地形。
2.可变刚度机制:通过改变连接到轮子最外层智能链块(smart chain block)的牵引力(即改变牵引线张力),来控制轮子的形状和刚度。
3.智能链结构:轮子的智能链结构由一系列链块组成,通过改变牵引线的张力,可以改变这些链块的紧密程度,从而改变轮子的刚度。
4.实时状态转换:轮子能够实现在高刚度状态(适合平坦地面高速运动)和低刚度状态(易于变形以适应障碍物)之间的实时转换。
5.实验系统:开发了一个实验系统来评估轮子的基本特性,包括使用负载传感器和激光位移传感器来测量轮子的反应力和位置。
实验结果1.刚度变化验证:实验结果显示,通过改变轮毂间隙距离(hub-gap distance),轮子的刚度可以显著变化,从而影响其变形高度。
2.障碍物克服能力:轮子成功演示了在遇到障碍物时降低刚度以适应其形状,并在通过障碍后恢复高刚度状态的能力。
3.车辆系统演示:将这种轮子应用于四轮车和两轮轮椅系统,证明了其在实际载重和户外环境中的实用性和有效性。
4.稳定性和牵引力:在不同载荷下测试了轮子的稳定性和牵引力,确保了其在不同条件下的性能。
5.高速行驶评估:在高速行驶条件下,评估了轮子的振动特性,确保了其在实际应用中的可靠性。